



Hoe Werkt een Pneumatische Grijper
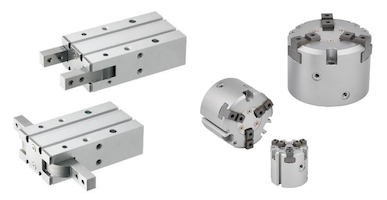
Figuur 1: Pneumatische grijpers
Een pneumatische grijper is een pick-and-place-apparaat dat perslucht gebruikt om de grijperhaken, ook wel vingers genoemd, te bedienen. Deze vingers, vergelijkbaar met menselijke vingers, helpen bij het grijpen, vasthouden en loslaten van de werkstukken. Gewoonlijk hebben zij 2 vingers (parallel of hoekig) of 3 vingers met een enkel- of dubbelwerkende cilinder voor de bediening. Zij worden meestal gebruikt in geautomatiseerde productieprocessen om een werkstuk te grijpen. De werkstukken kunnen variëren van kleine objecten zoals printplaten of chips tot grote objecten zoals een motorblok. Figuur 1 toont voorbeelden van pneumatische grijpers met 2 vingers en met 3 vingers.
Inhoudsopgave
- Voordelen van pneumatische grijpers
- Werking van de pneumatische grijper
- Pneumatische grijpers met 2 en 3 vingers
- Grijpkracht
- Selectiecriteria
- Toepassingen
Bekijk onze online selectie van pneumatische grijpers en cilinders!






Voordelen van pneumatische grijpers
De voordelen van pneumatische grijpers zijn onder meer:
- Lichtgewicht
- Kosteneffectief
- Hoge grijpkracht
- Mogelijkheid om verschillende werkstukconfiguraties vast te pakken
- Instelbare grijpkracht
Werking van de pneumatische grijper
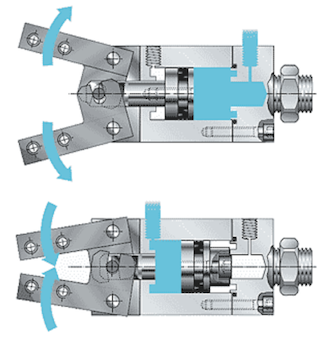
Figuur 2: Werkingsprincipe van de pneumatische hoekgrijper met 2 vingers
De grijper wordt aangesloten op de persluchtvoorziening. Terwijl de perslucht de cilinder binnengaat, wordt de zuigerstang aangedreven. De zuigerstang is verbonden met de vingers van de grijper. Terwijl de luchtdruk de zuiger op en neer beweegt, openen of sluiten de vingers zich parallel of hoekig. Dit mechanisme kan worden gebruikt bij een pick-and-place-bediening of om de oriëntatie van het voorwerp te wijzigen.
Figuur 2 toont de werking van een pneumatische 2-vingerige hoekgrijper. Dit is een dubbele cilinder. Wanneer de perslucht dus wordt aangesloten op de achterste cilinder (Afbeelding 2 bovenaan) duwt deze de zuiger naar voren, waardoor de vingers van de pneumatische grijper openen. Wanneer de perslucht wordt aangesloten op de voorste cilinder (Afbeelding 2 onderaan) duwt deze de zuiger naar achteren, waardoor de vingers van de pneumatische grijper sluiten.
De pneumatische grijpers worden ingedeeld op basis van de beweging van de grijpvingers, het grijpmechanisme en de configuraties. Hieronder worden de meest voorkomende besproken:
Parallelle grijper
Zoals de naam al aangeeft, beweegt de parallelle grijper zijn vingers parallel ten opzichte van de behuizing van de grijper. Parallelle grijpers zijn de meest gebruikte grijpers. Dit komt vooral omdat deze grijpers eenvoudig te ontwerpen en te installeren zijn dankzij de beweging met één as. Parallelle grijpers kunnen ook werkstukken met een grote verscheidenheid aan vormen en maten verwerken en kunnen dimensionale variaties opvangen. Afbeelding 3 toont de vingerbeweging.
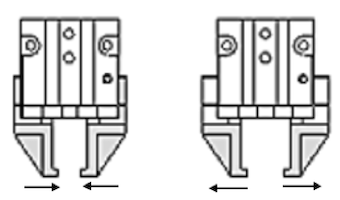
Figuur 3: Pneumatische parallelle grijpers die sluiten (links) en openen (rechts)
Hoekgrijper
De pneumatische hoekgrijper kan zijn vingers radiaal bewegen, door ze te openen en te sluiten rond een centraal draaipunt. Ze worden vaak gebruikt in toepassingen waar beperkte ruimte beschikbaar is, omdat de bekken omhoog en uit de weg kunnen bewegen. Deze grijpers zijn goed voor het vasthouden van grote werkstukken met vreemde vormen. Figuur 2 toont de vingerbeweging.
Pneumatische grijpers met 2 en 3 vingers
Pneumatische 2-vingergrijpers zijn de meest gebruikte grijpers. Het biedt 2 bevestigingsplaatsen voor de vingers. De vingers bewegen synchroon en openen en sluiten zich in de richting van de centrale as van de grijper.
3 vingergrijpers zijn zeer geschikt voor het hanteren van ronde voorwerpen en bieden meer grijpkracht dan 2 vingergrijpers. Het biedt 3 bevestigingsplaatsen voor de vingers. De vingers openen en sluiten in de richting van de centrale as van het grijperlichaam. De 3 vingers bieden meer steun en nauwkeurige centrering in vergelijking met grijpers met 2 vingers.
Externe en interne grip
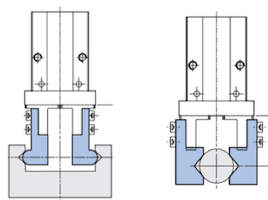
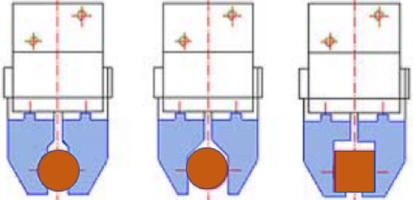
Figuur 4: Soorten pneumatische grijpers op basis van het grijpmechanisme: interne grijper (links) en externe grijper (rechts)
Op basis van het type greep kunnen pneumatische grijpers worden ingedeeld in interne, externe of gecombineerde grijpers. Voorbeelden worden hieronder besproken en getoond in figuur 4.
- Interne grip: Interne grijpers gebruiken openingskracht om het onderdeel vast te houden en grijpen het voorwerp via het interne oppervlak.
- Externe grip: Externe grijpers gebruiken de sluitkracht om het werkstuk vast te houden en grijpen het voorwerp vanaf het buitenoppervlak. Het is het meest voorkomende grijpmechanisme.
- Gecombineerde grip: Gebruikt een combinatie van extern en intern grijpen.
Enkelwerkende en dubbelwerkende grijpers
De pneumatische grijpers kunnen een enkel- of dubbelwerkende configuratie hebben. De enkelwerkende pneumatische grijpers hebben een veer om de aandrijving in één richting te ondersteunen (open of gesloten).
Pneumatische grijpers zijn meestal ontworpen om dubbelwerkend te zijn. Ze kunnen met perslucht worden bediend om zowel te openen als te sluiten. Met deze functie ken zowel intern als extern geklemd worden. De dubbelwerkende grijpers kunnen een ondersteunende functie met een veer hebben om het werkstuk vast te houden als de luchtdruk wegvalt.
Magnetische grijper
Magnetische grijpers zijn geschikt voor het hanteren van ferromagnetische voorwerpen. De grijpers zijn voorzien van permanente magneten in de kern. Afhankelijk van de sterkte van de magneet, kan deze worden gebruikt om een verscheidenheid aan voorwerpen te hanteren. Het is echter belangrijk op te merken dat de permanente magneten de neiging hebben hun magnetische eigenschap te verliezen bij hogere temperatuur (boven 150°C).
Vingervorm
Figuur 5: Vorm van vingers voor pneumatische grijpers: omvattend (links), wrijving (midden), retentie (rechts)
In het algemeen gebruiken de vingers van de pneumatische grijper wrijving voor de grijpkracht. Maar deze vingers kunnen ook als alternatief worden ontworpen om de voor de toepassing vereiste omvang en grijpkracht te beperken. De omsluitende en vasthoudende vorm verhogen de stabiliteit en verminderen de kracht die nodig is voor de greep. Figuur 5 toont enkele gangbare voorbeelden van verschillende vingervormen.
Herhaalbaarheid
De herhaalbaarheid is de maatstaf voor de maximale positienauwkeurigheid die de grijper kan bereiken. De pneumatische grijpers kunnen een verschillende herhaalbaarheid hebben, afhankelijk van het aantal vingers en de bedieningssnelheid. De herhaalbaarheid moet dus worden bepaald op basis van de voor de toepassing vereiste nauwkeurigheid.
Grijpkracht
De grijpkracht is de kracht die de grijpvingers op het werkstuk uitoefenen. Deze kracht kan verschillen afhankelijk van de luchtdruk, de wrijvingscoëfficiënt en de grijpomstandigheden tussen de vingers en het werkstuk. De grijpkracht voor alleen wrijving wanneer het werkstuk niet valt wanneer het wordt vastgepakt, wordt berekend als:

Waar:
- F = grijpkracht van één vinger (N)
- m = massa van het werkstuk (kg)
- g = zwaartekrachtversnelling (9,81 m/s²)
- a = Versnelling door dynamische beweging (m/s2)
- n = aantal vingers (n=2 voor tweevingergrijper; n=3 voor drievingergrijper)
- μ = wrijvingscoëfficiënt
- S = veiligheidsfactor
Als uw vingerontwerp en de methode om het voorwerp vast te pakken anders zijn dan alleen wrijving, kan een andere grijpkrachtformule nodig zijn.
Wrijvingscoëfficiënt
Hieronder staat een tabel met de wrijvingscoëfficiënt van gewone materialen. Deze cijfers zijn echter een eerste benchmark, aangezien zij voor elke toepassing anders zullen zijn en moeten worden geverifieerd.
| Werkstukmateriaal | Haakmateriaal | Wrijvingscoëfficiënt μ |
| Staal | Staal | 0.25 |
| Staal | Aluminium | 0.35 |
| Staal | Kunststof | 0.50 |
| Aluminium | Aluminium | 0.49 |
| Aluminium | Kunststof | 0.70 |
| Kunststof | Kunststof | 1 |
Veiligheidsfactor
Dit is slechts een aanbeveling en de veiligheidsfactor voor uw specifieke toepassing kan anders zijn:
- 2 - voor normaal gebruik
- 3 - voor beweging in verschillende richtingen
- 4 - voor schokken, snelle versnellingen of vertragingen
Montagemogelijkheden
De bevestigingsgaten bevinden zich aan de onderkant, zijkant en voorkant van de grijper en bieden veilige bevestigingsmogelijkheden. In Figuur 6 hieronder stellen A, C en D de montagegaten voor. Afhankelijk van de toepassing kunnen beide zijden voor montage worden gekozen. De luchtpoorten worden voorgesteld door B.
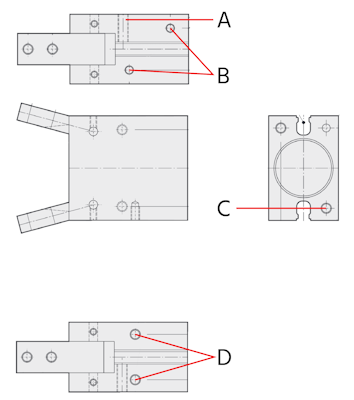
Figuur 6: Montagemogelijkheden voor de 2-vinger hoekgrijper: montagegaten (A, C, D) en luchtpoort (B).
Sensoren
Naast pneumatische grijpers kunnen sensoren worden geïnstalleerd om de werkpositie van de vingers te bewaken en te controleren. Op de pneumatische grijpers kunnen sensorschakelaars of naderingssensoren worden geïnstalleerd. Zij kunnen worden aangebracht in de groeven die in het lichaam aanwezig zijn, zoals te zien is in figuur 7. Deze sensoren kunnen de open of gesloten positie van de vingers detecteren. Nabijheidssensoren kunnen de nabijheid detecteren door het object te voelen en de informatie terugsturen naar de controller.
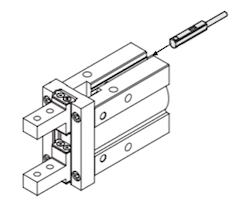
Figuur 7: Installatie van de sensorschakelaar
Selectiecriteria
- Grijpkracht: De effectieve grijpkracht kan worden berekend met de formule in dit artikel.
- Werkstukgewicht: De grijpkracht moet het gewicht van het werkstuk tijdens de bewerking kunnen dragen.
- Luchtdruk: Er moet rekening worden gehouden met de luchtdruk, aangezien die rechtstreeks van invloed is op de grijpkracht en de grootte van de grijper.
- Configuratie van het werkstuk: De vorm van het werkstuk zal helpen bepalen of 2 of 3 vingergrijpers kunnen worden gebruikt. 2 vingergrijpers worden gewoonlijk gebruikt en kunnen worden gebruikt voor de meest uiteenlopende voorwerpen. 3 vingergrijpers zijn geschikt voor ronde of cilindrische voorwerpen.
- Type grijper: De grijper kan een externe of interne greep hebben, afhankelijk van het werkstuk.
- Omgeving: Pneumatische grijpers moeten worden geselecteerd op basis van de gebruiksomgeving. Grijpers die voor schone omgevingen zijn ontworpen, kunnen in ruwe omgevingen falen.
Toepassingen
De pneumatische grijpers worden vaak gebruikt in de volgende industrieën:
- Robotica
- Productie van medische hulpmiddelen
- Farmaceutische en biotechnologische industrie
- Gieten en spuitgieten van kunststoffen
- Verwerking in laboratoria
- Automatisering





