



Hoe de Momentbelasting te Bepalen
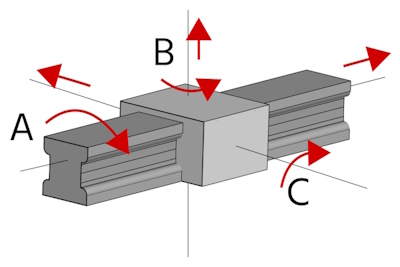
Figuur 1: Rotatiekrachten langs drie assen: rol (A), gier (B) en stamp (C)
Momentbelasting is de kracht die ervoor zorgt dat een object draait of buigt en is een cruciale factor in het ontwerp en de toepassing van lineaire actuatoren zoals pneumatische cilinders. Lineaire actuatoren zijn ontworpen om specifieke niveaus van momentbelasting te weerstaan, gedefinieerd als het toelaatbare bereik. Het overschrijden van deze limieten introduceert extra krachten op het geleidingssysteem van de actuator, wat de prestaties kan verminderen en de levensduur aanzienlijk kan verkorten.
Het berekenen van de momentbelasting is essentieel om ervoor te zorgen dat een actuator draai- of buigkrachten kan weerstaan, systeemfalen kan voorkomen en een efficiënte werking kan behouden. Dit helpt bij het selecteren van de juiste componenten en het ontwerpen van systemen die veilig, betrouwbaar en duurzaam zijn. Het begrijpen van momentbelasting is belangrijk voor:
- Componentselectie: Kies componenten die de verwachte momentbelastingen onder zowel statische als dynamische omstandigheden kunnen weerstaan.
- Systeemontwerp: Ontwerp systemen om momentbelastingen te minimaliseren door de afstand tussen de belasting en het draaipunt te verkleinen of contragewichten te gebruiken.
- Onderhoud en monitoring: Inspecteer regelmatig op slijtage of verkeerde uitlijning door overmatige belastingen en implementeer monitoringsystemen om belastingveranderingen te detecteren.
Inhoudsopgave
- Wat is momentbelasting?
- Factoren die de momentbelasting beïnvloeden
- Statische en dynamische momentbelastingen
- Veelgestelde vragen
Bekijk onze online selectie van pneumatische cilinders!




Wat is momentbelasting?
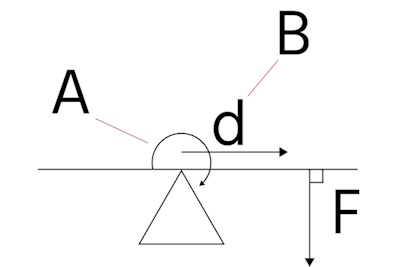
Figuur 2: Rotatiekrachten op objecten: draairichting (A), koppelarm (B), kracht (F) en de loodrechte afstand van de rotatieas tot de lijn van de kracht (d)
Momentbelasting is het resultaat van een kracht (F) die op een afstand (d) van een as wordt uitgeoefend, waardoor een neiging tot rotatie rond die as ontstaat. Deze rotatiekrachten, of koppel, kunnen in drie hoofdrichtingen worden toegepast:
- Rol (Figuur 1 gelabeld A): Rotatiebeweging rond de as
- Gier (Figuur 1 gelabeld B): Laterale beweging naar links of rechts
- Stamp (Figuur 1 gelabeld C): Opwaartse of neerwaartse beweging
Het is cruciaal om momentbelastingen te berekenen voordat u een pneumatische cilinder selecteert, deze in een toepassing installeert of wijzigingen aanbrengt in de belasting of montageconfiguratie.
Berekening van momentbelasting
De formule voor momentbelasting wordt gegeven door:
M = F × d
Waarbij:
- M: Momentbelasting
- F: De uitgeoefende kracht
- d: De afstand van de koppelarm vanaf de as
Om de totale momentbelasting te bepalen, overweeg de momenten in elke richting (stamp, gier, rol) en vergelijk deze met de toelaatbare momenten die voor de actuator zijn gespecificeerd. De som van de verhoudingen van deze momenten tot hun toelaatbare waarden moet minder dan 1,0 zijn voor een acceptabele configuratie.
Voorbeeld
Overweeg een robotarm die in een industriële omgeving wordt gebruikt voor taken zoals assemblage, lassen of materiaalverwerking. Deze robotarm is uitgerust met actuatoren die zijn beweging en positionering regelen. Elke actuator moet verschillende krachten en momenten aan kunnen terwijl de arm beweegt en met objecten omgaat.
Bijvoorbeeld, overweeg dat de robotarm de taak heeft om een zwaar object op te tillen. De kracht die door het gewicht van het object wordt uitgeoefend, gecombineerd met de afstand vanaf de rotatieas van de actuator (de koppelarm), genereert een moment in de stamprichting. Evenzo, als de arm moet draaien of zwenken terwijl hij het object vasthoudt, kunnen ook momenten in de gier- en rolrichtingen worden gegenereerd.
Om ervoor te zorgen dat de arm veilig en efficiënt werkt, is het noodzakelijk om de momenten in de stam-, gier- en rolrichtingen te berekenen en deze te vergelijken met de toelaatbare limieten van de actuator, zoals te zien in Tabel 1.
Tabel 1: Voorbeeldberekeningen van stamp-, rol- en giermomenten voor een lineaire actuator
| Richting | Kracht (N) | Afstand van de koppelarm (m) | Berekend moment (Nm) | Toelaatbaar moment (Nm) | Verhouding |
| Stamp | 30 | 0.5 | 15 | 30 | 0.5 |
| Gier | 15 | 0.3 | 4.5 | 15 | 0.3 |
| Rol | 5 | 0.2 | 1 | 10 | 0.1 |
De som van de verhoudingen (0,9) is minder dan 1,0, wat aangeeft dat de configuratie acceptabel is en binnen de toelaatbare limieten valt. Als de uiteindelijke verhouding de acceptabele limieten overschrijdt, overweeg dan om de uitgeoefende krachten te verminderen, de afstanden van de koppelarmen te verkorten of te upgraden naar actuatoren met hogere toelaatbare momenten. Alternatief, pas de armconfiguratie aan of herverdeel de belasting om de momenten effectiever in balans te brengen.
Factoren die de momentbelasting beïnvloeden
Bij het berekenen van momentbelastingen in industriële toepassingen kunnen verschillende factoren de resultaten beïnvloeden:
- Grootte van de actuator en massacapaciteit: De grootte van de actuator, bijvoorbeeld de diameter en slaglengte van een pneumatische cilinder, speelt een cruciale rol bij het bepalen van zijn vermogen om krachten en momenten te hanteren. Grotere cilinders, met een grotere diameter en slag, kunnen hogere drukken aan en meer kracht genereren, waardoor ze grotere momenten kunnen beheren. Bovendien beïnvloedt de te vervoeren massa de grootte van deze krachten, waarbij zwaardere lasten grotere momenten genereren. De structurele integriteit en het ontwerp van de cilinder moeten voldoende zijn om deze belastingen zonder vervorming of falen te ondersteunen.
-
Positionering:
- Verticaal: Zwaartekracht heeft een aanzienlijke impact op verticale cilinders, verhoogt de neerwaartse snelheid en vereist meer kracht voor opwaartse beweging, wat het energieverbruik en de slijtage van het systeem kan beïnvloeden.
- Horizontaal: Zwaartekracht beïnvloedt voornamelijk wrijving en uitlijning, wat de momentbelastingen kan verhogen als de belasting ongelijk verdeeld is.
- Belastingpositionering: De locatie van het zwaartepunt is cruciaal. Als het over de ondersteuning hangt, creëert het extra momenten, wat leidt tot onevenwichtigheden en verhoogde stress op het systeem.
- Capaciteiten van de actuator: De actuator moet de krachten en momenten effectief hanteren. Geavanceerde besturingssystemen kunnen helpen bij het beheren van dynamische effecten en onevenwichtigheden, waardoor de precisie wordt verbeterd en de slijtage wordt verminderd.
Statische en dynamische momentbelastingen
Momentbelastingen kunnen dynamisch zijn, optreden tijdens de werking als gevolg van factoren zoals zwaartekracht en versnelling, of statisch, aanwezig wanneer het systeem in rust is. Beide soorten momentbelastingen kunnen de uitlijning en prestaties van componenten beïnvloeden.
Tabel 1: Statische en dynamische momentbelastingen
| Aspect | Statische momentbelasting | Dynamische momentbelasting |
| Definitie | Belasting die constant blijft of zeer langzaam verandert in de tijd | Belasting die varieert met de tijd als gevolg van beweging of externe krachten |
| Tijdsafhankelijkheid | Tijdsonafhankelijk | Tijdsafhankelijk |
| Voorspelbaarheid | Voorspelbaar en gemakkelijker te ontwerpen | Complex en vaak onvoorspelbaar |
| Voorbeelden | Gewicht van een stilstaand object op een balk | Krachten op een roterende arm door veranderende snelheden |
| Analyse | Richt zich op evenwicht en materiaalkracht | Houdt rekening met traagheid, demping en tijdsafhankelijke factoren |
| Ontwerpoverwegingen | Benadrukt sterkte en stabiliteit | Vereist flexibiliteit, demping en energieabsorptie |
Veelgestelde vragen
Hoe wordt het moment berekend?
Het moment wordt berekend door de uitgeoefende kracht te vermenigvuldigen met de loodrechte afstand van het draaipunt tot de lijn van de kracht.
Wat is een lastmomentindicator op kranen?
Een lastmomentindicator (LMI) op kranen berekent het lastmoment (product van het gewicht van de last en de straal) om ervoor te zorgen dat het binnen veilige grenzen blijft, overbelasting voorkomt en de veiligheid verbetert.