Hoe Werkt een Regelaar voor Proportionele Magneetventielen


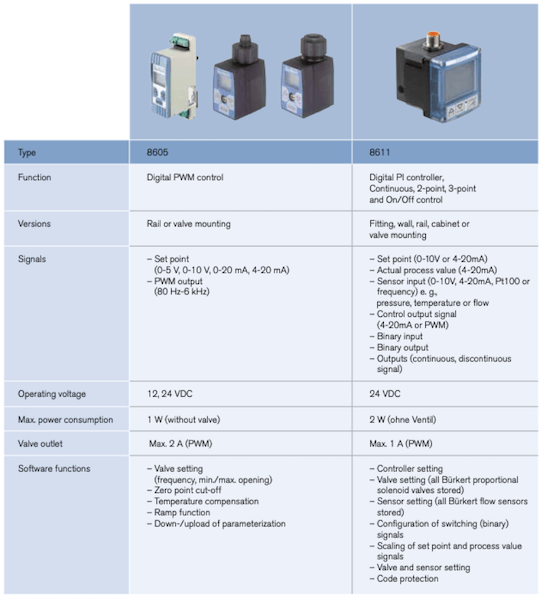
Figuur 1: Burkert proportionele klepbesturing 8611 (links) en 8605 (rechts)
Proportionele magneetventielen worden gebruikt om de vloeistofstroom te regelen door de positie van de klepplunjer te variëren. De regeling van het debiet wordt meestal gebruikt om de druk, het niveau en de temperatuur te regelen. Andere procesvariabelen zoals pH-waarde, geleidbaarheid en vochtigheid kunnen ook worden beïnvloed door de stroomsnelheid. De positie van de plunjer wordt geregeld door een magnetisch veld dat wordt opgewekt door een voeding op de elektromagnetische spoel aan te sluiten. Normaal gesproken zijn proportionele magneetventielen normaal gesloten (sluiten zonder stroom), maar ze kunnen ook normaal open zijn (openen zonder stroom). Dit artikel gaat over normaal gesloten proportionele magneetventielen.
Wanneer de spoel van stroom wordt voorzien, komt de plunjer omhoog en duwt tegen de veerkracht om de klep te openen. Zonder voeding wordt de plunjer door een veer tegen de klepzitting gedrukt om de klepuitlaat te sluiten. In tegenstelling tot een standaard magneetventiel met directe bediening kan de plunjerpositie van een proportioneel magneetventiel worden geregeld over een reeks slagposities door het vermogen dat aan de magneetspoel wordt geleverd te variëren. Kleppen die geschikt zijn voor proportionele regeling hebben een iets ander ontwerp om de positiestabiliteit van de plunjer in tussenliggende posities te verbeteren. De klepvoeding wordt meestal automatisch geregeld met een pulsbreedtemodulatieregelaar (PWM) zoals de Burkert 8611 (afbeelding 1 links) of 8605 (afbeelding 1 rechts) regelaars. Ze worden proportionele klepbesturingen genoemd.
De Burkert 8611 en 8605 controllers zijn beide ontworpen voor het aansturen van Burkert proportionele kleppen, maar kunnen ook kleppen van andere merken aansturen. De 8605 is een speciale proportionele klepregelaar en de 8611 is een universele regelaar. De 8611 kan proportionele kleppen en andere proceskleppen en -apparaten aansturen. Elke regelaar is uitgerust met configureerbare besturingsfuncties voor een nauwkeurige en betrouwbare procesbesturing. Bovendien zijn er meerdere ontwerpopties beschikbaar om te voldoen aan de behoeften van procesregeltoepassingen.
Dit artikel bespreekt de werking van proportionele magneetventielregelaars met pulsbreedtemodulatie (PWM) en PI (proportioneel en integraal) regeltheorie en geeft een overzicht van de 8611 en 8605 proportionele magneetventielregelaars van Burkert. Daarnaast hebben we artikelen over de 8611 en 8605 waarin deze controllers uitgebreider worden besproken.
Inhoudsopgave
- Pulsbreedtemodulatie (PWM)
- PI-regeltheorie (proportioneel en integraal)
- Overzicht van 8605 vs 8611
- Aanvullende informatie
Koop nu Burkert 8605 en proportionele magneetventielen online!


Pulsbreedtemodulatie (PWM)
De 8611 en 8605 types van Burkert zijn beide uitgerust met regeltechnologie om PWM (pulsbreedtemodulatie) uitgangssignalen te genereren om proportionele magneetventielen in een systeem aan te sturen.
Het PWM-signaal is een pseudo-analoog signaal dat wordt gemaakt van een digitaal signaal dat aan en uit wordt geschakeld. PWM bestaat uit twee hoofdcomponenten die de uitgang beïnvloeden, de schakelfrequentie en de duty cycle. De schakelfrequentie bepaalt hoe snel een cyclus tussen AAN en UIT wordt voltooid. Een schakelfrequentie van 20 Hz is bijvoorbeeld 20 cycli per seconde. De duty cycle vertegenwoordigt het percentage van de tijd dat het signaal aan staat ten opzichte van de volledige cyclus. Bij een duty cycle van 75% zal de signaaluitgang bijvoorbeeld 75% van de cyclus AAN zijn. De duty cycle en schakelfrequentie beïnvloeden de effectieve stroom die tijdens de modulatie aan de elektromagneet wordt geleverd.
Hoewel de PWM-spanningspulsen naar de spoel vierkant zijn, wordt de stroom aan de spoel geleverd in een zaagtandcurve vanwege de spoelinductie en de duty cycle (afbeelding 2). Het resultaat is een constante oscillatie van de plunjer in een gebalanceerde toestand die gewoonlijk dither wordt genoemd. Ditheren vermindert statische wrijving en vermindert hysteresis (waarbij de werkelijke plunjerpositie achterblijft bij de opdrachtpositie). In Figuur 2 zijn de tijd uit (toff) en tijd aan (ton) van de duty cycle en de nominale spanning (U) is wat wordt geleverd waardoor de resulterende spanningsgolf (I) ontstaat.
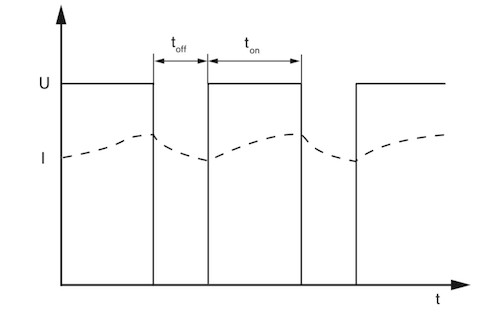
Figuur 2: PWM-signaal
De gevoeligheid van de kleppen en de ditherbeweging worden beïnvloed door de eigenschappen van de spoel, de schakelfrequentie en de duty cycle. De reactie van de klep op een PWM-signaal is het gevoeligst wanneer deze in een specifiek schakelfrequentiebereik (f) met een optimale inschakelduur werkt. Het punt waarop de klep het meest reageert, staat bekend als het werkpunt. Het werkpunt wordt in Figuur 3 getoond op het snijpunt van de bovenste frequentie en 60% duty cycle. Bij de bovenste (fHI) en onderste (fLO) frequentiegrenzen zal de klep langzamer reageren op een PWM-signaal. Een voorbeeld van het ideale werkbereik van een proportionele klep wordt getoond in Figuur 3.
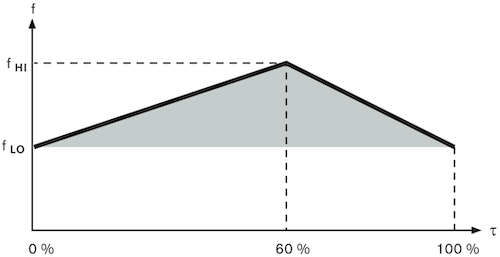
Figuur 3: Bedrijfsparameters proportionele klep
De grensfrequenties, optimale inschakelduur en spoeleigenschappen zijn allemaal uniek en cruciaal voor een nauwkeurige regeling van elke klep. Storingen aan de klep of een hoger hoorbaar geluid kunnen het gevolg zijn als een klep wordt aangestuurd met onjuiste bedrijfsparameters.
Het voordeel van het gebruik van de series proportionele kleppen van Burkert met hun regelaars is dat de juiste schakelfrequenties en werkpunten voor alle kleppen bekend zijn. Burkert bepaalde deze waarden empirisch voor elk type klep. De 8611 onthoudt de schakelfrequentielimieten van alle Burkert-ventielen. Tijdens de configuratie van de regelaar kan het ventieltype worden ingevoerd en worden de bedrijfsparameters automatisch geladen in het regelschema zonder verdere configuratie. De 8605 bevat standaard de meeste frequenties in het geheugen, maar sommige moeten mogelijk worden gecontroleerd voordat ze worden gebruikt. Alle bedrijfsparameters van Burkert proportionele kleppen worden geleverd door Burkert. Bij gebruik van een proportioneel magneetventiel van een ander merk met een Burkert regelaar moeten de bedrijfsparameters correct worden ingevoerd voor optimale prestaties.
De regelfuncties die worden gebruikt om het PWM-signaal te regelen voor de besturing van het proces verschillen tussen de 8611 en 8605. Het meest opvallende verschil tussen de regelaars is dat de 8611 een gesloten regelkring gebruikt voor PWM. De 8605 gebruikt open-lusregeling voor PWM. De verschillen en besturingsfuncties die voor elk model beschikbaar zijn, worden verder in dit artikel besproken.
PI-regeltheorie (proportioneel en integraal)
Een PI-regelkring (Afbeelding 4) is een gesloten regelkring die een regelvariabele (d.w.z. PWM-schakelfrequentie) aanpast aan de gemeten terugkoppeling van de procesvariabele die wordt geregeld (d.w.z. druk). De PI-regelkring gebruikt parameters die bekend staan als proportionele en integrale termen om de controlevariabele dynamisch aan te passen om fouten te verminderen. De 8611 kan werken met een gesloten lussysteem, terwijl de 8605 alleen een open lus heeft.
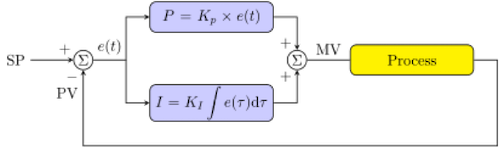
Figuur 4: Blokschema PI-regelkring
- SP: Gewenst instelpunt
- PV: Gemeten procesvariabele
- e(t): Foutwaarde
- P: Proportionele parameter
- Kp: Proportionele afstemconstante
- I: Integrale parameter
- KI: Integrale afstemconstante
- MV: Gemeten (of controle) variabele
De proportionele en integrale parameters worden berekend met behulp van de systeemfout. De proportionele parameter is het product van een afstemfactor en het verschil tussen het gewenste setpoint (d.w.z. het gewenste druksetpoint) en een gemeten procesvariabele (d.w.z. de gemeten werkelijke druk). De integrale parameter houdt rekening met fouten over een bepaalde tijdsperiode. Het product van een afstemmingsfactor en het verschil tussen het gewenste setpoint en een gemeten procesvariabele geïntegreerd over een bepaalde tijdsperiode wordt gebruikt om de integrale parameter te definiëren. De vergelijking in Figuur 5 laat zien dat de som van de proportionele en integrale parameters wordt gebruikt om de waarde van de stuurvariabele (u(t)) te bepalen.
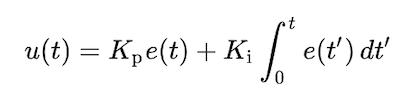
Figuur 5: PI-regelvariabele formule
Het doel van een PI-besturingsalgoritme is om de systeemfout in de loop van de tijd te stabiliseren en te verminderen door een besturingsvariabele nauwkeurig te regelen. Deze methode wordt veel gebruikt in processen voor vloeistofregeling. In theorie is het algoritme vrij eenvoudig en relatief gemakkelijk te implementeren in veel toepassingen. De regelaar moet echter goed worden afgesteld met de juiste proportionele en integrale parameters. Zonder de juiste afstelling kan de controlevariabele overreageren op systeemveranderingen of rond het gewenste setpoint schommelen. Aangezien elk proces anders is, zal elk systeem andere afstelparameters gebruiken om de gewenste prestaties te bereiken. Hoewel er verschillende tuningmethodes bestaan, is het het meest gebruikelijk om elke parameter handmatig aan te passen totdat stabiliteit wordt bereikt. De meeste fabrikanten van besturingssystemen bieden richtlijnen voor uitgangspunten. Zonder nauwkeurige invoer en geoptimaliseerde afstelparameters gaat de besturingsstabiliteit verloren.
De voordelen van een gesloten regelkring zoals een PI-kring zijn onder andere:
- Verminderde hysteresis vanaf instelpunt
- Geautomatiseerde correctie van procesfouten
- Verhoogde processtabiliteit
Overzicht 8611 vs 8605