



Hoe Werkt een Pneumatische Cilinder Sensor

Figuur 1: Verschillende benaderingssensoren voor pneumatische cilinders
Sensoren worden gebruikt om positieterugkoppeling te geven aan regelsystemen in geautomatiseerde machines en apparatuur. Pneumatische cilinders gebruiken sensoren om de lineaire positie van de zuiger te detecteren voor toepassingen waarbij positieterugkoppeling cruciaal is. Het meest gebruikte type sensor voor pneumatische cilinders zijn magnetische naderingssensoren, die het magnetische veld detecteren van een magneet die in de zuiger van de cilinder is geïntegreerd. De sensor wordt op het huis van de pneumatische cilinder gemonteerd en geeft "AAN" of "UIT" aan op basis van de nabijheid van de magneet. Afhankelijk van de toepassing kunnen verschillende magnetische benaderingssensortechnologieën worden gebruikt om de prestaties, ruimte en betrouwbaarheid te maximaliseren. Figuur 1 toont voorbeelden van verschillende benaderingssensoren voor pneumatische cilinders.
Reed-sensoren zijn het meest voorkomende type sensor voor pneumatische cilinders. Ze worden al jaren gebruikt en het is bewezen technologie. De twee belangrijkste aandachtspunten voor een rietsensor ten opzichte van andere sensoren die hieronder worden besproken, zijn de levensduur en schokken en trillingen. Reed-sensoren hebben meestal een levensduur van meer dan 10 miljoen en meestal is de reed-sensor niet de eerste die het begeeft als hij wordt blootgesteld aan grote schokken of trillingen. Om deze redenen waren en zijn reed-sensoren nog steeds de populairste pneumatische cilindersensoren.
Bekijk onze online selectie van pneumatische cilindersensoren!








Inhoudsopgave
- Waarom een sensor gebruiken voor een pneumatische cilinder?
- Montage van sensor voor pneumatische cilinder
- Opties voor magnetische naderingssensor
- Hoe kies je een sensor?
- Vergelijking van pneumatische cilindersensoren
- Positiesensoren online kopen
Waarom een sensor gebruiken voor een pneumatische cilinder?
Pneumatische cilinder lineaire positiesensoren worden gebruikt om de lineaire positie van de zuiger tijdens bedrijf te detecteren. Pneumatische cilinders worden meestal gemaakt met een magneet die al inwendig aan de zuiger is bevestigd, zodat desgewenst magnetische naderingssensoren kunnen worden gebruikt. Afhankelijk van waar de sensor is gemonteerd, kan hij afzonderlijke posities langs het cilinderlichaam detecteren. Er kunnen ook meerdere sensoren op één pneumatische cilinder worden aangesloten voor meerdere locaties voor positieterugkoppeling. Pneumatische cilinders met positiesensoren zorgen voor extra veiligheid en feedback om de positie van de zuiger voor cruciale toepassingen te garanderen.
Montage van sensor voor pneumatische cilinder
De twee meest voorkomende types cilinderbehuizing zijn profiel, zoals ISO 15552, of rond, zoals ISO 6432. Afhankelijk van het carrosserietype zijn er verschillende montagemethoden. Montagemethodes kunnen ook veranderen bij verschillende sensortypes, dus het is belangrijk om te weten welk type cilinderhuis je hebt met welk sensortype.
Profielcilinders
Profielcilinders zijn rechthoekig van vorm en hebben twee eenvoudige methoden om sensoren op het cilinderhuis te monteren. Voor pneumatische cilinders die voldoen aan ISO 15552 zijn er groeven langs de behuizing om een sensor in te plaatsen, zoals te zien is in Afbeelding 2. De sensor (1) wordt dan met een schroevendraaier (3) vastgezet met een stelschroef (2). Andere profielcilinders hebben trekstangen die over de lengte van het cilinderlichaam op alle vier de hoeken lopen. Sensoren kunnen op de trekstang worden gemonteerd en in de juiste positie langs de lengte van de cilinder worden geschoven.
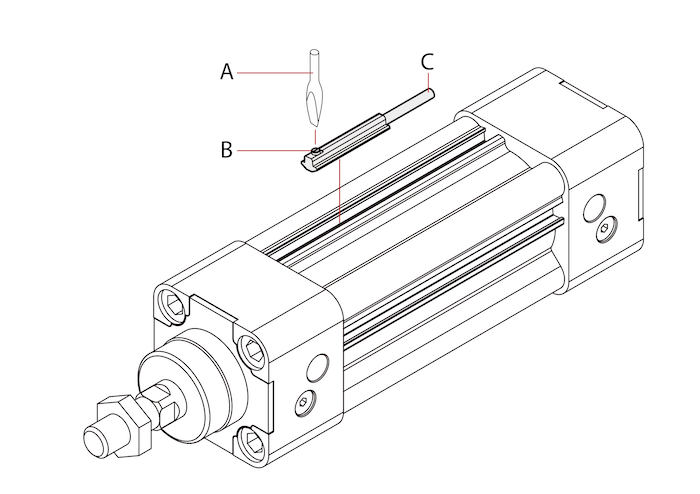
Figuur 2: ISO 15552 pneumatische cilinder met een sensor (C) gemonteerd via stelschroef (B) met een schroevendraaier (A)
Ronde cilinders
Ronde cilinders zijn over het algemeen kleiner, zoals ISO 6432, maar sensoren kunnen er nog steeds op gemonteerd worden door een cirkelvormige band rond de behuizing van de cilinder te gebruiken. De band moet worden gespecificeerd in overeenstemming met de diameter van de cilinder. Eenmaal gemonteerd kunnen de sensor en de band over de lengte van de cilinder glijden en op hun plaats worden vastgezet. Een ISO 6432 pneumatische cilinder met een sensor erop is te zien in Figuur 3.

Figuur 3: ISO 6432 pneumatische cilinder met gemonteerde sensor
Opties voor magnetische naderingssensor
Alle sensoren die worden gebruikt voor pneumatische cilinders voor feedback over de lineaire positie van de zuiger maken gebruik van een magnetisch veld. Daarom hebben normaal gesproken alle pneumatische cilinders al een magneet inwendig op de zuiger. Het is echter nog steeds belangrijk om deze ontwerpspecificatie te controleren voor uw pneumatische cilinder als lineaire positieterugkoppeling vereist is.
Reedschakelaar
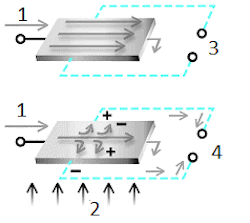
Een sensor met een reed-schakelaar is een magnetische nabijheidssensor die "AAN" wordt gezet wanneer er een axiaal uitgelijnd magnetisch veld op wordt toegepast. De magnetische polen van een axiaal uitgelijnde magneet liggen naast elkaar in het axiale vlak. Wanneer de axiaal uitgelijnde magneet de reed-sensor nadert, wordt een magnetisch veld parallel aan de reed-schakelaar opgewekt. Een reed-schakelaar bestaat uit een paar ferromagnetische metalen tongen die in een verzegelde glazen buis zitten. Zonder de aanwezigheid van een magnetisch veld (bovenste afbeelding Afbeelding 4) worden de metalen rietjes gescheiden en wordt de sensor "UIT" geschakeld. Als de cilinderzuiger de schakelaar passeert en een magnetisch veld uitoefent dat sterk genoeg is om het riet samen te trekken (middelste afbeelding afbeelding afbeelding 4), wordt de sensor ingeschakeld (onderste afbeelding afbeelding afbeelding 4).

Figuur 4: Bediening met rietschakelaar
In vergelijking met andere sensoropties zijn reedschakelaars kosteneffectief en kunnen ze worden gebruikt met AC- of DC-spanningen. Bovendien hebben sensoren met reed-schakelaars een laag energieverbruik, waardoor ze geschikt zijn voor toepassingen die veel stroom verbruiken. Vanwege de mechanische aard van schakelende reedcontacten hebben reedschakelaarsensoren hun beperkingen. Ten eerste hebben de schakelcontacten een eindig aantal schakelcycli en hebben ze onderhoud nodig gedurende de levensduur van de machine. Daarnaast zijn reed-switch sensoren niet geschikt voor toepassingen die blootstaan aan hoge trillingen of schokken. Hoge schokken en trillingen kunnen ervoor zorgen dat de reedcontacten gaan klapperen, waardoor de signalering onnauwkeurig wordt. De schakeleigenschappen van een reed-schakelaar kunnen ook onbedoeld dubbel schakelen veroorzaken. Er is sprake van dubbel schakelen als de sensoruitgang tweemaal "AAN" en "UIT" schakelt terwijl de cilindermagneet eenmaal de reed-schakelaar passeert. De valse dubbele schakeling van de sensoruitgang is te wijten aan de niet-uniforme sterkte van het krachtveld van een magneten. De sterkte van een magneetveld is het sterkst bij elke pool van de magneet en het zwakst in het midden tussen elke pool. Als de zuigermagneet niet sterk genoeg is, kan dit ertoe leiden dat de uitgang van de schakelaar dubbel schakelt als deze over de sensor gaat. Tot slot zijn reed-schakelaars, in vergelijking met solid-state sensoren, relatief traag om te activeren, waardoor ze ongeschikt zijn voor toepassingen die snelle reactietijden vereisen. Reedschakelaarsensoren voor pneumatische cilinders worden echter veel gebruikt omdat ze relatief goedkoop zijn in vergelijking met andere sensoren, geen stand-by stroom nodig hebben, zowel met DC- als AC-belastingen kunnen werken en een bewezen bekende oplossing zijn.
Hall-effectsensor
Een hall-effectsensor is een magnetische nabijheidssensor die "aan" wordt gezet wanneer er een radiaal uitgelijnd magnetisch veld op wordt toegepast. Een radiaal gerichte magneet produceert een magnetisch veld dat loodrecht op het magnetische veld van de hall-effectsensor staat, zoals te zien is in figuur 5. In tegenstelling tot reed-schakelaars zijn hall-effectsensoren solid-state apparaten en ontworpen met verschillende componenten. Reed-schakelaars zijn afhankelijk van bewegende mechanische contacten om sensoruitgangen te leveren. Solid-state apparaten leveren sensoruitvoer door gebruik te maken van elektrische circuits zonder bewegende onderdelen. Een hall-effectsensor bestaat uit een halfgeleider waar continu stroom doorheen loopt, zoals te zien is in de bovenste afbeelding in Afbeelding 5. Wanneer een magnetisch veld radiaal (2) wordt toegepast op de stroom (1) zoals te zien is in de onderste afbeelding in figuur 5, scheiden de geladen elektronen zich naar tegenoverliggende zijden van de halfgeleider op basis van polariteit. De scheiding van geladen elektronen induceert een spanning over het hall-effectcircuit (4). Zodra de uitgangsspanning over het circuit groter is dan de schakeldrempel wordt de sensoruitgang "AAN" geschakeld, zoals te zien is in Figuur 5.
Figuur 5: Werking Hall-effectsensor: stroom (1), magnetisch veld (2), spanning = 0 (3 & 4)
In tegenstelling tot sensoren met een reed-schakelaar hebben hall-effectsensoren geen bewegende onderdelen en nemen ze minder ruimte in beslag. Het solid-state ontwerp verlengt de levensduur van de sensor dankzij de slijtagevrije werking en maakt ze ook bestand tegen schokken en trillingen. Omdat de traagheid van mechanische componenten niet hoeft te worden overwonnen, zijn hall-effectsensoren ook geschikt voor tijdkritische toepassingen waarbij snel geschakeld moet worden. Net als bij sensoren met een reed-schakelaar is de oriëntatie van de magneet belangrijk voor een goede werking. Bovendien hebben hall-effectsensoren een lage gevoeligheid. Afhankelijk van de diameter en dikte van het cilinderhuis is het mogelijk dat de schakeluitgang niet goed werkt. Net als bij reed-schakelaars zijn dubbele schakelpunten ook mogelijk vanwege de lage gevoeligheid van de sensoren.
Anisotrope magnetoresistieve sensor
Een anisotrope magnetoresistieve sensor (AMR) is een magnetische nabijheidssensor in vaste toestand die "aan" wordt gezet wanneer er een radiaal of axiaal magnetisch veld op wordt toegepast. Een AMR-schakeling bestaat uit een Wheatstone-brugschakeling (Afbeelding 6) om de weerstand te meten. De weerstand van een AMR-sensor zal afnemen met de sterkte van het magnetische veld, wat resulteert in een grotere spanningsgradiënt over het AMR-circuit. Zodra de spanning over het circuit groter is dan de schakeldrempel (Afbeelding 6 nummer 3), wordt de sensoruitgang "AAN" geschakeld, zoals te zien is in Afbeelding 6 nummer 4.
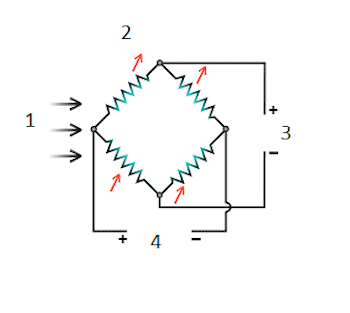
Figuur 6: Werking AMR-sensor: magnetisch veld (1), toegepast magnetisch veld (2), voorspanning (3) en spanning = 0 (4)
Net als hall-effectsensoren werken AMR-sensoren snel, zijn ze slijtagevrij en bestand tegen schokken en trillingen. Het voordeel van AMR-sensoren is dat ze minder gevoelig zijn dan hallsensoren en goed reageren op veranderingen in de magnetische veldsterkte. Dit resulteert in een betere zuigdetectie over grotere afstanden dankzij het vermogen om zwakkere magneetvelden te detecteren. De mogelijkheid van dubbele schakelpunten wordt geëlimineerd dankzij de hogere gevoeligheid. Bovendien detecteren de sensoren axiaal en radiaal gemagnetiseerde magneten. AMR-sensoren zijn compacter dan sensoren met een reed-schakelaar en zijn voordelig. Een nadeel van AMR-sensoren is dat ze meestal continu stroom verbruiken. Voor toepassingen met een laag stroomverbruik kan een sensor met een reed-schakelaar een geschiktere sensor zijn.
Reusachtige magnetoresistieve sensor
Een magnetoresistieve reuzensensor (GMR) is een magnetische naderingssensor in vaste toestand die "aan" wordt gezet wanneer er een radiaal of axiaal magneetveld op wordt toegepast. Een GMR-sensor is opgebouwd uit verschillende lagen van afwisselend magnetische en niet-magnetische geleidende lagen zoals te zien is in Figuur 7 nummers 2 en 3. Net als bij een AMR-sensor veranderen de weerstandseigenschappen van het circuit wanneer er een magnetisch veld wordt toegepast op de sensor, waardoor er een hogere spanningsgradiënt over het circuit ontstaat naarmate het magnetische veld toeneemt. Bijvoorbeeld, in de aanwezigheid van een magnetisch veld (Afbeelding 7 nummer 1) neemt de weerstand van het circuit af waardoor er stroom gaat lopen (Afbeelding 7 nummer 4) en de spanning over het circuit toeneemt. Zodra de spanning over het circuit groter is dan de schakeldrempel, wordt de sensoruitgang "AAN" geschakeld.
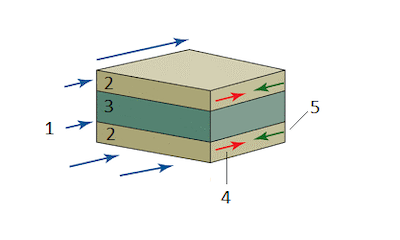
Figuur 7: Werking GMR-sensor: toegepast extern magnetisch veld (1), ferromagnetische laag (2), geleidende niet-magnetische laag (3), lage weerstand bij toegepast magnetisch veld (4) en hoge weerstand zonder extern magnetisch veld (5)
GMR-sensoren bieden dezelfde voordelen als AMR-sensoren, maar zijn nog gevoeliger voor de aanwezigheid van een magnetisch veld. De hoge gevoeligheid maakt ook een zeer compacte sensor mogelijk, die geschikt is voor kleinere en kortere cilinders. Hoewel hoge gevoeligheid een voordeel is voor toepassingen die onmiddellijke sensorfeedback nodig hebben, kan het onbedoelde uitgangssignalering veroorzaken als het verstoord wordt door omringende magnetische velden. Omgevingen met veel vermogen in de buurt (wisselstroommotoren of inkomende wisselstroom) kunnen bijvoorbeeld het sensorsignaal verstoren en onbedoelde fouten veroorzaken.
Hoe kies je een sensor?
Voor de meeste toepassingen wordt meestal een reed-sensor gekozen. Het is bewezen technologie en ze hebben een levensduur en trillingsbestendigheid die lang genoeg is om gangbare toepassingen aan te kunnen. Andere criteria voor speciale toepassingen zijn echter:
- Omgeving: Wordt de cilinder blootgesteld aan grote hoeveelheden trillingen of schokken? Als dat het geval is, zal een sensor met halfgeleiders betrouwbaar werken zonder geratel aan de uitgang. Gangbare halfgeleidersensoren zijn hall-effect-, AMR- en GMR-sensoren. Daarnaast moet de sensor in een gesloten, schone omgeving worden geplaatst of heeft hij een behuizing met een hoge beschermingsgraad nodig, zoals IP67. Er moet ook rekening worden gehouden met de temperatuur.
- Schakelsnelheid: Hoe belangrijk is de schakelsnelheid aan de uitgang voor uw toepassing? Solid-state sensoren bieden een snellere schakeltijd. Gangbare halfgeleidersensoren zijn hall-effect-, AMR- en GMR-sensoren.
-
Type uitvoer: Welk type uitgangssignaal is vereist voor het besturingssysteem? Voor solid-state apparaten zijn PNP- en NPN-uitgangssignalen beschikbaar.
- PNP: Een PNP-uitgang biedt een pad om de uitgang van positieve voeding te voorzien. Dit staat ook bekend als "sensoren sourcen". PNP komt vaker voor in Noord-Amerika en Europa.
- NPN: Een NPN-uitgang biedt een pad om de voeding naar massa te leiden. Dit staat ook bekend als een "zinkende sensor". NPN wordt als populairder beschouwd in Azië.
- Kenmerken van het schakelsignaal: Wat zijn de schakelvermogens en stroomvereisten van het besturingssysteem? De geselecteerde sensor moet compatibel zijn voor een goede werking.
- Montage: Welke montageopties zijn er voor elk cilindertype? Afhankelijk van of je een profielcilinder met groeven of trekstangen hebt of een ronde cilinder, veranderen de montagetypes.
- Magneetoriëntatie: Reedschakelaars en hall-effectsensoren vereisen de juiste oriëntatie van het toegepaste magnetische veld voor een goede werking. Daarom moet de sensor in de juiste richting ten opzichte van de zuiger worden gemonteerd.
- Circuitbeveiliging: Indien nodig kunnen sensoren circuitbeveiligingen bevatten, zoals kortsluiting, omgekeerde polariteit en overspanningsbeveiliging.
- Bedrading: De bedrading van de voeding naar de sensor verschilt afhankelijk van of de sensor een solid-state sensor is (bijv. AMR, GMR, halleffect) of een reed-sensor. Een LED om de juiste bedrading aan te geven is vaak beschikbaar voor elke sensor. Als bijvoorbeeld de polariteit van de voeding naar een reed-schakelaar wordt omgekeerd, gaat de LED op de sensor niet branden. Reed-schakelsensoren hebben over het algemeen een 2-draads configuratie, terwijl solid-state sensoren 3 draden hebben. Naast een positieve en negatieve draad wordt een derde draad gebruikt voor aansluiting op de belasting. Controleer altijd de juiste bedrading van de belastingdraad voordat u de voeding inschakelt, want verkeerde bedrading kan de sensor permanent beschadigen.
Vergelijking van pneumatische cilindersensoren
| Rietschakelaar | Hall-effect | AMR | GMR | |
| Maat | Groot | Klein | Medium: | Klein |
| Bouwwijze | Mechanisch | Vaste staat | Vaste staat | Vaste staat |
| Magneetsterkte vereist | Medium: | Hoog | Laag | Laag |
| Gevoeligheid | Medium: | Laag | Hoog | Hoog |
| Temperatuurstabiliteit | Medium: | Laag | Medium: | Hoog |
| Stroomverbruik | Zero | Laag | Hoog | Laag |
| Immuniteit voor ruis | Hoog | Laag | Hoog | Hoog |
| Schakelsnelheid | Laag | Hoog | Hoog | Hoog |
| Mechanical Robustness | Laag | Medium: | Hoog | Hoog |
| Elektrische robuustheid | Laag | Laag | Hoog | Hoog |
| Dubbele schakelpunten | Ja | Mogelijk | Nee | Nee |
Lees ons artikel over pneumatische cilinders voor meer informatie over de werking en de soorten pneumatische cilinders.